
��˾��
-
 [07-23] ���ܜp�ٙC���a�c����ļ��g���߀ʮ�ִ����ܜp�ٙC�ڹ��I�ϵ���;ʮ�֏V�����ǂ��dz���Ҫ�ĭh�������ǣ��ձ��ڹ��I�C���˵ľ��ܜp�ٙC�Ј������ѽ��γ��ˉŔ��λ���@�������҇��mȻҲ�����a��rv�p�ٙC��������ˮƽ�������ԇ��a�ęC�����r���ˆ��� Ŀǰ�Ї��Ј��ϵľ��ܜp�ٙC���ֶ��������M�ڣ����������y����������������ձ������Ȱl�_���ҵĜp�ٙC���oՓ���ڿɿ��ԣ��|�����ƣ��OӋˮƽ���ֻ��Dz��| ���ܜp�ٙC�ڹ��I�ϵ���;ʮ�֏V�����ǂ��dz���Ҫ�ĭh�������ǣ��ձ��ڹ��I�C���˵ľ��ܜp�ٙC�Ј������ѽ��γ��ˉŔ��λ���@�������҇��mȻҲ�����a��rv�p�ٙC��������ˮƽ�������ԇ��a�ęC�����r���ˆ��� Ŀǰ�Ї��Ј��ϵľ��ܜp�ٙC���ֶ��������M�ڣ����������y����������������ձ������Ȱl�_���ҵĜp�ٙC���oՓ���ڿɿ��ԣ��|�����ƣ��OӋˮƽ���ֻ��Dz��|
[07-23] ���ܜp�ٙC���a�c����ļ��g���߀ʮ�ִ����ܜp�ٙC�ڹ��I�ϵ���;ʮ�֏V�����ǂ��dz���Ҫ�ĭh�������ǣ��ձ��ڹ��I�C���˵ľ��ܜp�ٙC�Ј������ѽ��γ��ˉŔ��λ���@�������҇��mȻҲ�����a��rv�p�ٙC��������ˮƽ�������ԇ��a�ęC�����r���ˆ��� Ŀǰ�Ї��Ј��ϵľ��ܜp�ٙC���ֶ��������M�ڣ����������y����������������ձ������Ȱl�_���ҵĜp�ٙC���oՓ���ڿɿ��ԣ��|�����ƣ��OӋˮƽ���ֻ��Dz��| ���ܜp�ٙC�ڹ��I�ϵ���;ʮ�֏V�����ǂ��dz���Ҫ�ĭh�������ǣ��ձ��ڹ��I�C���˵ľ��ܜp�ٙC�Ј������ѽ��γ��ˉŔ��λ���@�������҇��mȻҲ�����a��rv�p�ٙC��������ˮƽ�������ԇ��a�ęC�����r���ˆ��� Ŀǰ�Ї��Ј��ϵľ��ܜp�ٙC���ֶ��������M�ڣ����������y����������������ձ������Ȱl�_���ҵĜp�ٙC���oՓ���ڿɿ��ԣ��|�����ƣ��OӋˮƽ���ֻ��Dz��| -
 [07-14] ��ν��͜p�ٙC�X݆�������͜p�ٙC�\�Еr���X݆�������ѳɞ��ИI�ȵ���Ҫ�о��n�}�������ⲻ�ٌW�߶����X݆������݆�X���τ��ȵ�׃���������X݆���d����Ӻ�������Ҫ���ء������εķ�����ʹ����d�ɼ��ٶȲ��Ӝp����С�����_����������Ŀ�ġ��@�N�����ڌ��`���C����һ�N�^��Ч�ķ������������@�N��������ˇ����Ҫ�������O�䣬�V���С�С�S�����o����ʩ�� ���^�����о��������ͨ�^�����X݆��������׃λϵ�����X��ϵ�� ���͜p�ٙC�\�Еr���X݆�������ѳɞ��ИI�ȵ���Ҫ�о��n�}�������ⲻ�ٌW�߶����X݆������݆�X���τ��ȵ�׃���������X݆���d����Ӻ�������Ҫ���ء������εķ�����ʹ����d�ɼ��ٶȲ��Ӝp����С�����_����������Ŀ�ġ��@�N�����ڌ��`���C����һ�N�^��Ч�ķ������������@�N��������ˇ����Ҫ�������O�䣬�V���С�С�S�����o����ʩ�� ���^�����о��������ͨ�^�����X݆��������׃λϵ�����X��ϵ��
[07-14] ��ν��͜p�ٙC�X݆�������͜p�ٙC�\�Еr���X݆�������ѳɞ��ИI�ȵ���Ҫ�о��n�}�������ⲻ�ٌW�߶����X݆������݆�X���τ��ȵ�׃���������X݆���d����Ӻ�������Ҫ���ء������εķ�����ʹ����d�ɼ��ٶȲ��Ӝp����С�����_����������Ŀ�ġ��@�N�����ڌ��`���C����һ�N�^��Ч�ķ������������@�N��������ˇ����Ҫ�������O�䣬�V���С�С�S�����o����ʩ�� ���^�����о��������ͨ�^�����X݆��������׃λϵ�����X��ϵ�� ���͜p�ٙC�\�Еr���X݆�������ѳɞ��ИI�ȵ���Ҫ�о��n�}�������ⲻ�ٌW�߶����X݆������݆�X���τ��ȵ�׃���������X݆���d����Ӻ�������Ҫ���ء������εķ�����ʹ����d�ɼ��ٶȲ��Ӝp����С�����_����������Ŀ�ġ��@�N�����ڌ��`���C����һ�N�^��Ч�ķ������������@�N��������ˇ����Ҫ�������O�䣬�V���С�С�S�����o����ʩ�� ���^�����о��������ͨ�^�����X݆��������׃λϵ�����X��ϵ�� -
 [07-14] �p�ٙC���b���M����ЩҪ���p�ٙC���M��ʲôҪ�� ��1���p�ٙC���ľ��c�������ľ�֮�g��λ��ƫ������^3 mm�� ��2���O���_�Ĺ̶�ͨ��ͨ�^�c����ʽ����ĺ����M�У����Ӹ߶ȑ�������ĺ�������ĺ�ȡ� ��3���ڰ��b���C�r���D�P��ƽ����ˮƽ�ģ��D�P�c�����ƽ�жȞ�2m M / m���@�r�����c�����C�ͻ�����Ƕ��ʽ�����Ȼ�����M��ȫ��yԇ�� ��4�������b�˻���֧�ܺ�RAM�r�� �p�ٙC���M��ʲôҪ�� ��1���p�ٙC���ľ��c�������ľ�֮�g��λ��ƫ������^3 mm�� ��2���O���_�Ĺ̶�ͨ��ͨ�^�c����ʽ����ĺ����M�У����Ӹ߶ȑ�������ĺ�������ĺ�ȡ� ��3���ڰ��b���C�r���D�P��ƽ����ˮƽ�ģ��D�P�c�����ƽ�жȞ�2m M / m���@�r�����c�����C�ͻ�����Ƕ��ʽ�����Ȼ�����M��ȫ��yԇ�� ��4�������b�˻���֧�ܺ�RAM�r��
[07-14] �p�ٙC���b���M����ЩҪ���p�ٙC���M��ʲôҪ�� ��1���p�ٙC���ľ��c�������ľ�֮�g��λ��ƫ������^3 mm�� ��2���O���_�Ĺ̶�ͨ��ͨ�^�c����ʽ����ĺ����M�У����Ӹ߶ȑ�������ĺ�������ĺ�ȡ� ��3���ڰ��b���C�r���D�P��ƽ����ˮƽ�ģ��D�P�c�����ƽ�жȞ�2m M / m���@�r�����c�����C�ͻ�����Ƕ��ʽ�����Ȼ�����M��ȫ��yԇ�� ��4�������b�˻���֧�ܺ�RAM�r�� �p�ٙC���M��ʲôҪ�� ��1���p�ٙC���ľ��c�������ľ�֮�g��λ��ƫ������^3 mm�� ��2���O���_�Ĺ̶�ͨ��ͨ�^�c����ʽ����ĺ����M�У����Ӹ߶ȑ�������ĺ�������ĺ�ȡ� ��3���ڰ��b���C�r���D�P��ƽ����ˮƽ�ģ��D�P�c�����ƽ�жȞ�2m M / m���@�r�����c�����C�ͻ�����Ƕ��ʽ�����Ȼ�����M��ȫ��yԇ�� ��4�������b�˻���֧�ܺ�RAM�r�� -
[07-09] ���I�C���ˇ��H�a�I�lչ�F���C���˼������M����I���P�I֧���b�䣬Ҳ�Ǹ���������ʽ����Ҫ�����c���C���˵��аl����a�I�������Ǻ���һ�����ҿƼ����¡��߶�����lչˮƽ����Ҫ��־֮һ��Ŀǰ���C���ˮa�I���g�ѽ��M����ȫ�µ� 2.0 �r�������I�I��Ĺ��I�C�����ѽ��lչ�ɞ�һ�N�߂��Ը�֪���ԛQ�ߺ��Ԉ����������������a�C�������I�C����������I�аl�]��������ã��Ƅ�������aˮƽ��������������Ľ����lչ������Ҫ��ؕ�I�����u�顰�� �C���˼������M����I���P�I֧���b�䣬Ҳ�Ǹ���������ʽ����Ҫ�����c���C���˵��аl����a�I�������Ǻ���һ�����ҿƼ����¡��߶�����lչˮƽ����Ҫ��־֮һ��Ŀǰ���C���ˮa�I���g�ѽ��M����ȫ�µ� 2.0 �r�������I�I��Ĺ��I�C�����ѽ��lչ�ɞ�һ�N�߂��Ը�֪���ԛQ�ߺ��Ԉ����������������a�C�������I�C����������I�аl�]��������ã��Ƅ�������aˮƽ��������������Ľ����lչ������Ҫ��ؕ�I�����u�顰��
-
 [06-30] ���I�C���˔[���p�ٙC���C���p�ٙC���ȷ������鹤�I�C���˺����㲿���ľ��ܜp�������cͨ�Üp������ȣ��C�����Üp����Ҫ����Ђ���朶̡��w�eС�����ʴ��|���p�����ڿ��Ƶ����c�� ���^�C���p�������������C��ԭ���ƳɵĜp�������c�����Ĝp������ȣ������нY���o�����p�ٱȴ��ȸߡ������͵����c���C���p�����dz��m���ڸ�C���˵��P�������{���C���˸��۵��\���ٶȺ�ݔ��Ť�ء� �C���p�����ɡ��� ���鹤�I�C���˺����㲿���ľ��ܜp�������cͨ�Üp������ȣ��C�����Üp����Ҫ����Ђ���朶̡��w�eС�����ʴ��|���p�����ڿ��Ƶ����c�� ���^�C���p�������������C��ԭ���ƳɵĜp�������c�����Ĝp������ȣ������нY���o�����p�ٱȴ��ȸߡ������͵����c���C���p�����dz��m���ڸ�C���˵��P�������{���C���˸��۵��\���ٶȺ�ݔ��Ť�ء� �C���p�����ɡ���
[06-30] ���I�C���˔[���p�ٙC���C���p�ٙC���ȷ������鹤�I�C���˺����㲿���ľ��ܜp�������cͨ�Üp������ȣ��C�����Üp����Ҫ����Ђ���朶̡��w�eС�����ʴ��|���p�����ڿ��Ƶ����c�� ���^�C���p�������������C��ԭ���ƳɵĜp�������c�����Ĝp������ȣ������нY���o�����p�ٱȴ��ȸߡ������͵����c���C���p�����dz��m���ڸ�C���˵��P�������{���C���˸��۵��\���ٶȺ�ݔ��Ť�ء� �C���p�����ɡ��� ���鹤�I�C���˺����㲿���ľ��ܜp�������cͨ�Üp������ȣ��C�����Üp����Ҫ����Ђ���朶̡��w�eС�����ʴ��|���p�����ڿ��Ƶ����c�� ���^�C���p�������������C��ԭ���ƳɵĜp�������c�����Ĝp������ȣ������нY���o�����p�ٱȴ��ȸߡ������͵����c���C���p�����dz��m���ڸ�C���˵��P�������{���C���˸��۵��\���ٶȺ�ݔ��Ť�ء� �C���p�����ɡ��� -
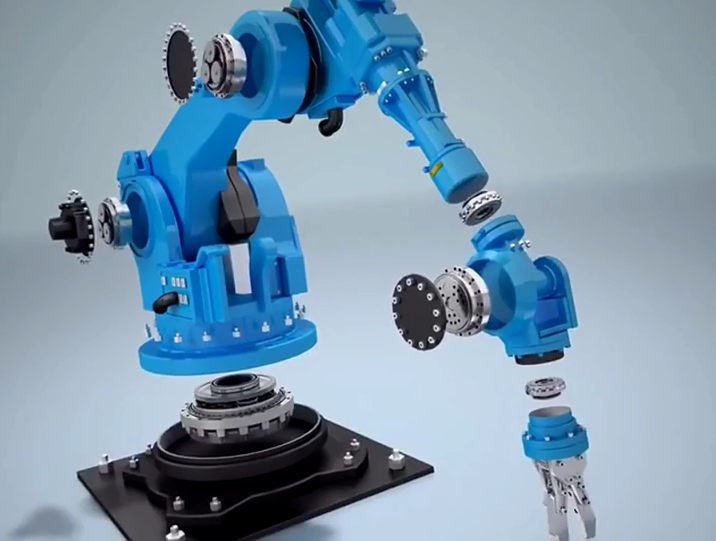
 [06-30] �Cе�ֵ��P������ʲô�B�ӵģ����@ƪ����������Փ��3�S߀��6�S�ęCе�֣����õĶ��ǽ����ŷ�늙C�����Ҷ��ǎ��x܇�ġ� ���a��һ�㶼�ǽ^��ֵ�ġ����ǽ^��ֵ��늙C��ÿ��ͣ�C�����һ������Ć��}�� �Cе�ֶ�Ҫ�õ��p���� �����M�ڵ�ABB�ęCе�ִ��������Լ�������X݆�C���p�١� 6�S���I�C���˵�1��2��3�S�õĶ���RV�p�ٙC�����ڔ[���݆�Y����4��5��6�Sһ������C���p�ٙC�� ��Փ��3�S߀��6�S�ęCе�֣����õĶ��ǽ����ŷ�늙C�����Ҷ��ǎ��x܇�ġ� ���a��һ�㶼�ǽ^��ֵ�ġ����ǽ^��ֵ��늙C��ÿ��ͣ�C�����һ������Ć��}�� �Cе�ֶ�Ҫ�õ��p���� �����M�ڵ�ABB�ęCе�ִ��������Լ�������X݆�C���p�١� 6�S���I�C���˵�1��2��3�S�õĶ���RV�p�ٙC�����ڔ[���݆�Y����4��5��6�Sһ������C���p�ٙC��
[06-30] �Cе�ֵ��P������ʲô�B�ӵģ����@ƪ����������Փ��3�S߀��6�S�ęCе�֣����õĶ��ǽ����ŷ�늙C�����Ҷ��ǎ��x܇�ġ� ���a��һ�㶼�ǽ^��ֵ�ġ����ǽ^��ֵ��늙C��ÿ��ͣ�C�����һ������Ć��}�� �Cе�ֶ�Ҫ�õ��p���� �����M�ڵ�ABB�ęCе�ִ��������Լ�������X݆�C���p�١� 6�S���I�C���˵�1��2��3�S�õĶ���RV�p�ٙC�����ڔ[���݆�Y����4��5��6�Sһ������C���p�ٙC�� ��Փ��3�S߀��6�S�ęCе�֣����õĶ��ǽ����ŷ�늙C�����Ҷ��ǎ��x܇�ġ� ���a��һ�㶼�ǽ^��ֵ�ġ����ǽ^��ֵ��늙C��ÿ��ͣ�C�����һ������Ć��}�� �Cе�ֶ�Ҫ�õ��p���� �����M�ڵ�ABB�ęCе�ִ��������Լ�������X݆�C���p�١� 6�S���I�C���˵�1��2��3�S�õĶ���RV�p�ٙC�����ڔ[���݆�Y����4��5��6�Sһ������C���p�ٙC��